0. 前言
主控芯片:海思 Hi3861LV100
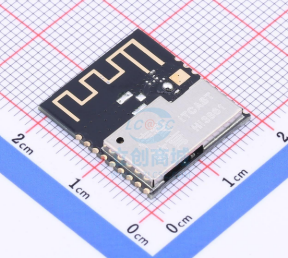
传智教育Hi3861 IoT WiFi 模组是一款基于海思Hi3861LV100 芯片的系统级封装模组,可提
供完整的Wi-Fi IoT 开发功能。该模组的外观尺寸仅为20 mm×18 mm×2.54 mm, 模组
已将晶振、滤波电容、WiFi 天线等外围器件集成封装,只需要3.3V 供电即可正常工作。使用
传智教育Hi3861 IoT WiFi 模组可以大大提升开发和管控效率,降低供应链的复杂程度。模组
可以广泛应用于,智能家电、智能门锁、低功耗Camera、穿戴设备、医疗设备、传感器及其
他低功耗IoT 设备。
主要规格
WiFi 特性
支持WiFi 802.11b/g/n
支持最大速率:72.2Mbps@HT20 MCS7
支持标准20MHz 带宽和5M/10M 窄带宽
CPU 子系统
高性能32bit 微处理器,最大工作频率160MHz
内嵌SRAM 352KB
内嵌ROM 288KB
内嵌Flash 2MB
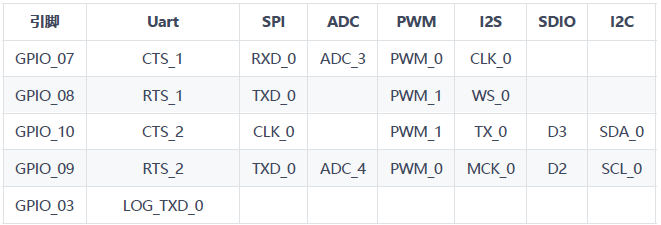
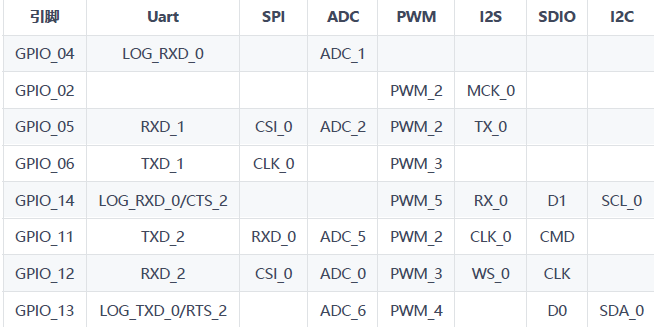
外围接口
SPI 1x
I2C 1x
SDIO 2.0 1x
UART 3x
PWM 6x
ADC 7x
GPIO 13x
I2S 1x
最小系统示意图
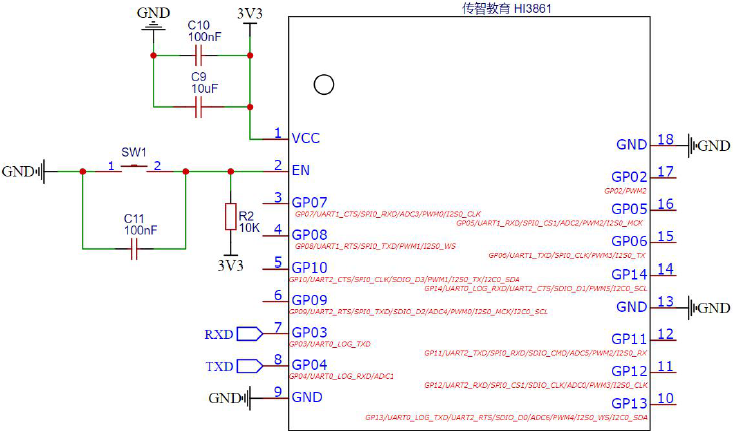
VCC 3.3V 供电,放置100nf 和10uf 的滤波电容
EN 引脚拉高,芯片使能
SW1 为reset 按键,拉低芯片重启
程序烧录可以自行设计usb 转串口电路,或者购买类似下图的USB 转TTL 的串口下载
器,下载器3V3 接模组3V3,GND 接模组GND,下载器RXD 接模组GP03 引脚,下载
器TXD 接模组GP04 引脚。
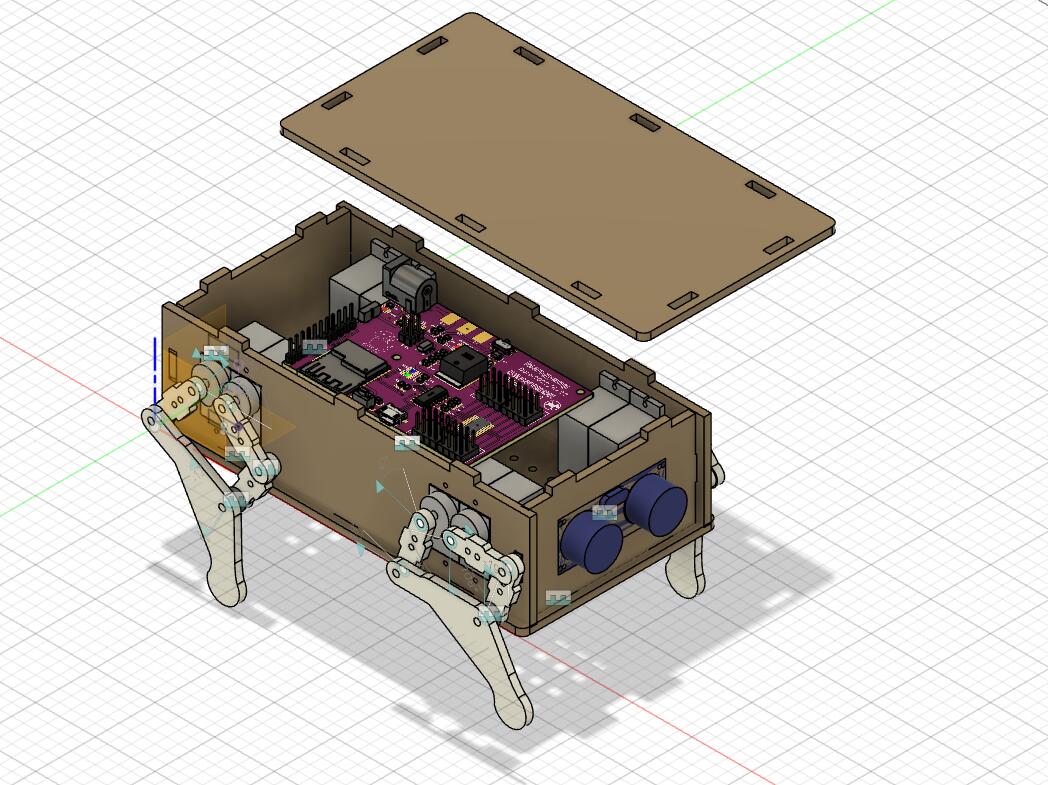
1. 采用Fusion360进行结构设计
2. 机器狗步态分析


不同的步态:
- walk:行走
- amble:漫步
- pace:慢走
- trot:快步
- canter:慢跑
- qallup/ run:奔跑
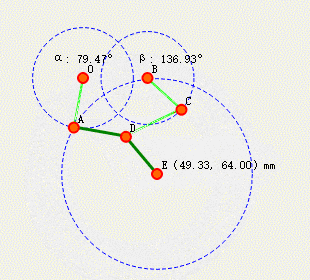
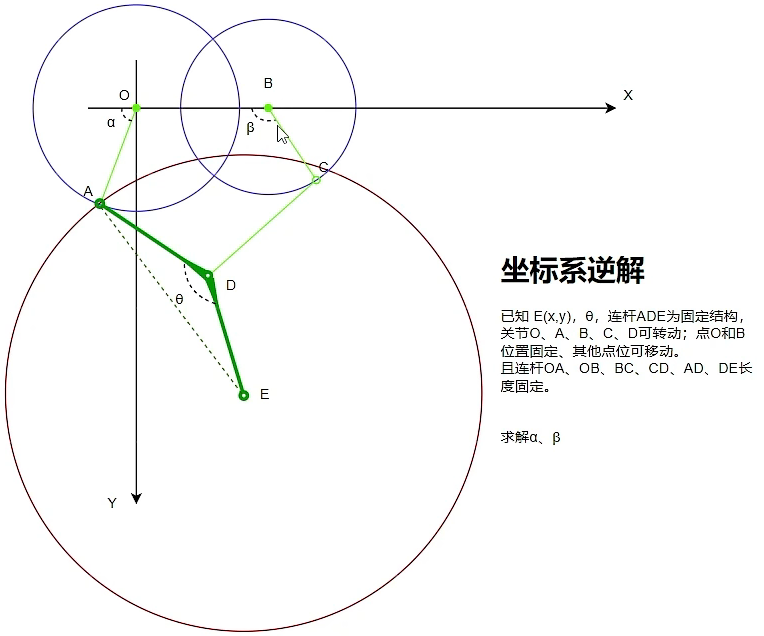
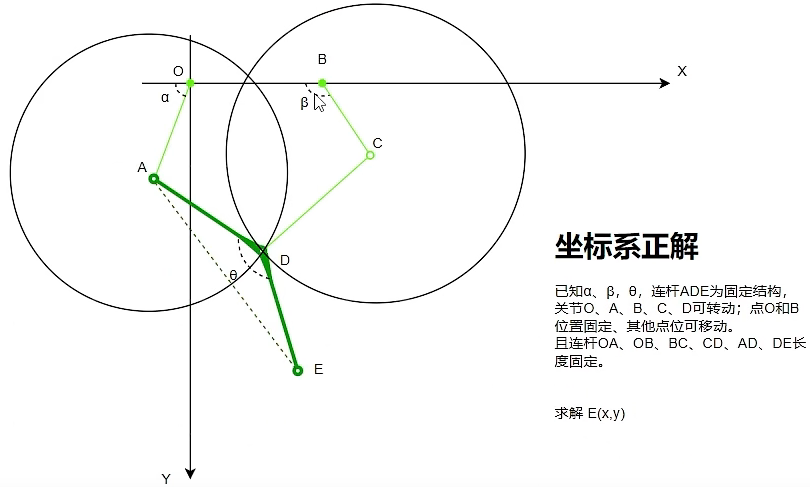
3. 狗腿坐标反解
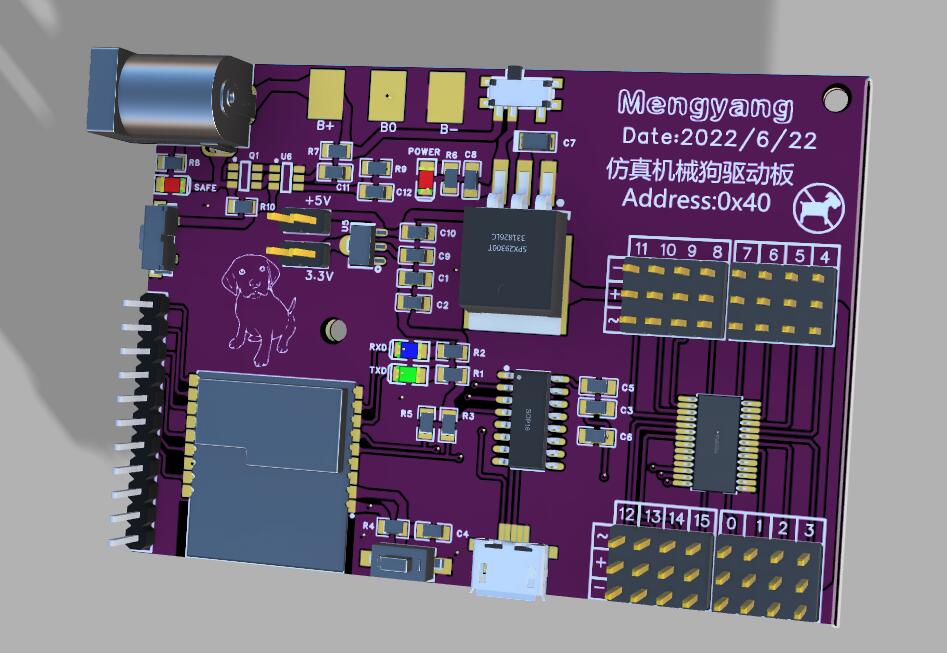
4. 嘉立创EDA硬件设计
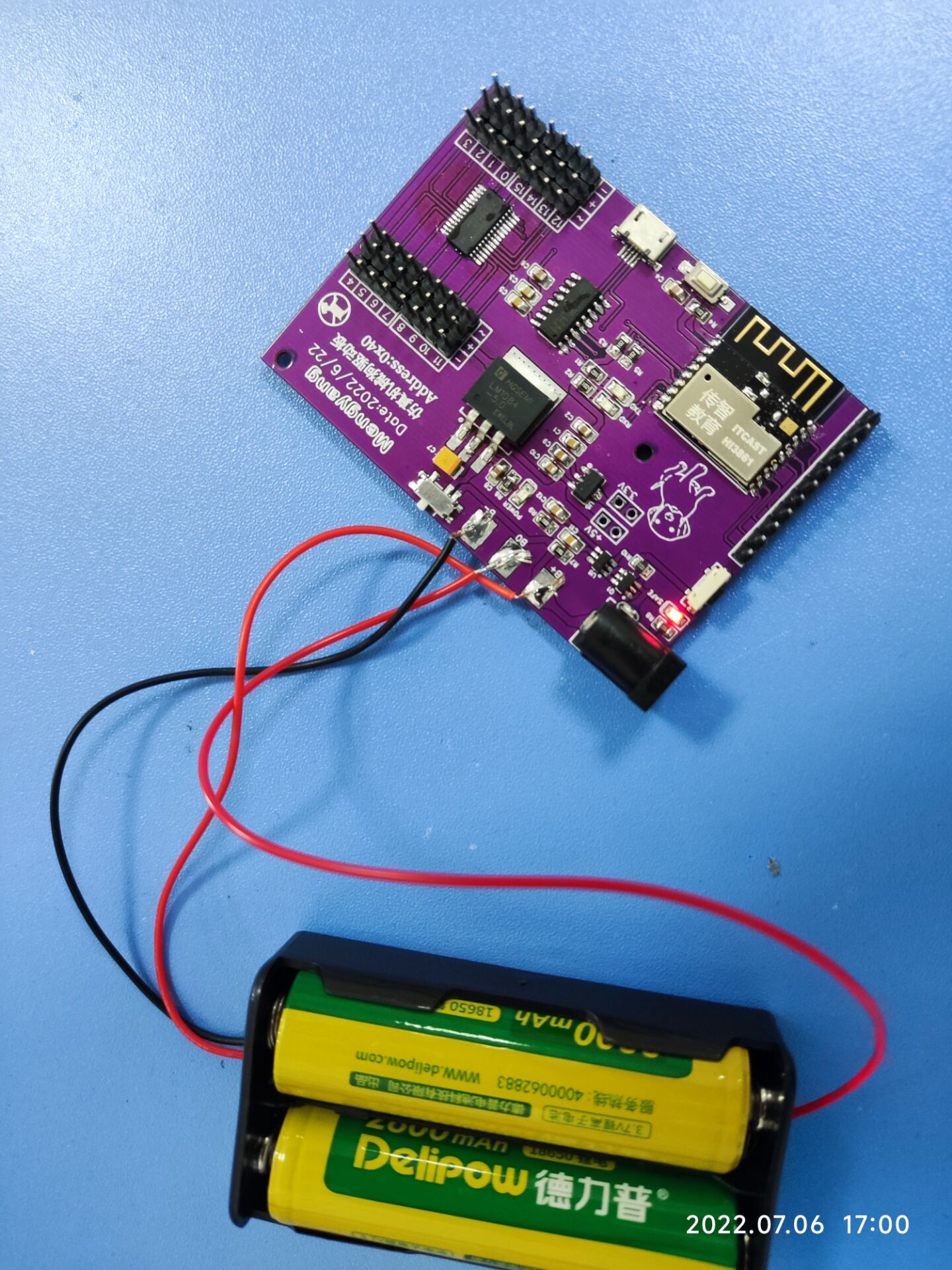
5. 机器狗的安装
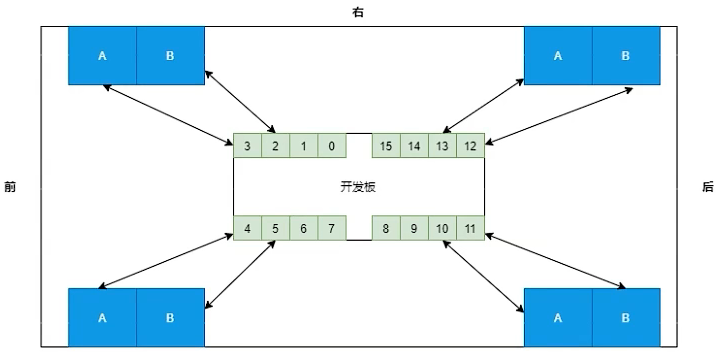
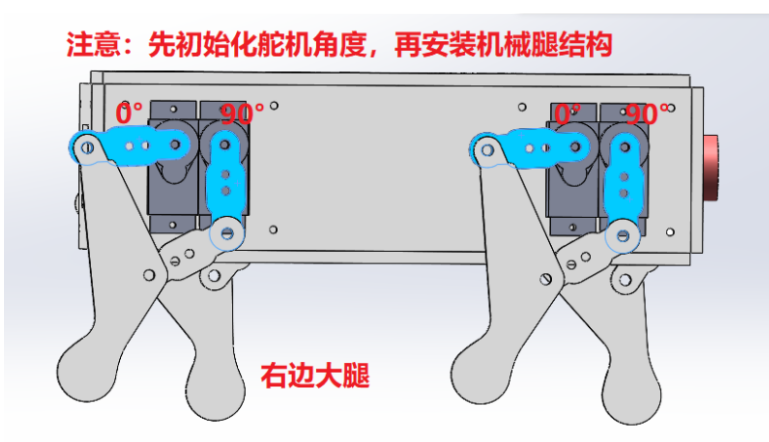
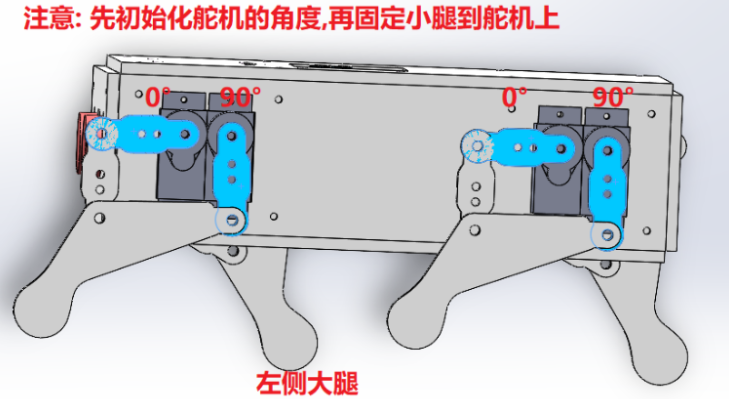
6. 舵机控制和步态编程
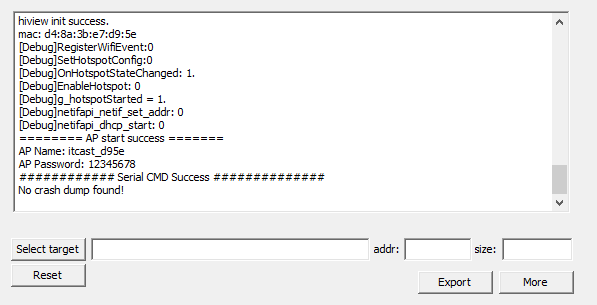
固件下载下载方法:
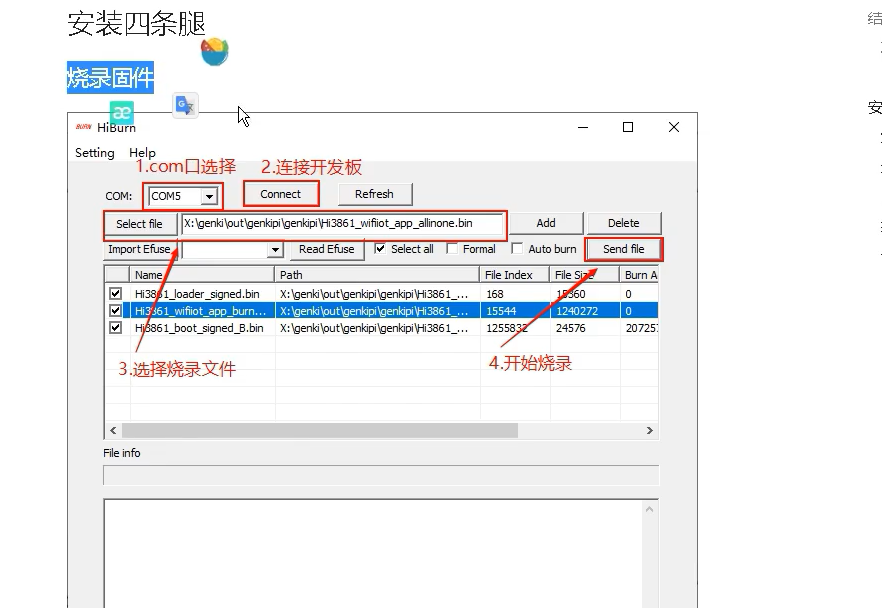
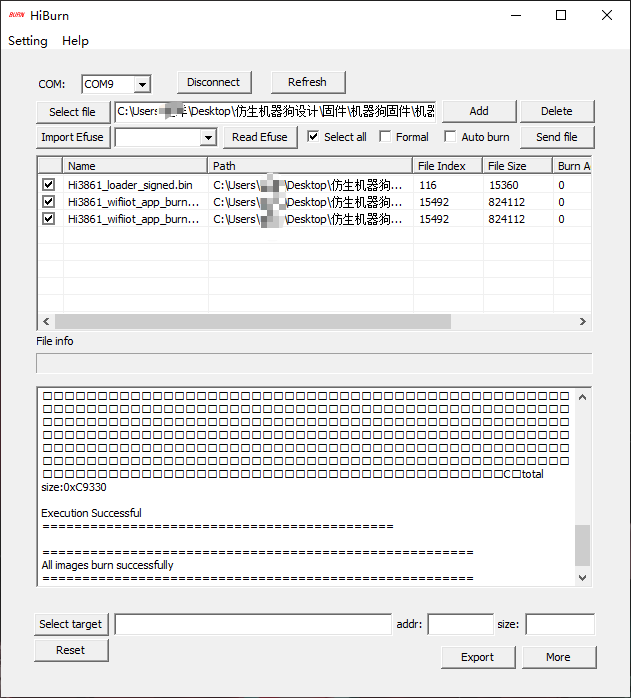
注意事项:连接后按一下复位键才能进行程序下载。